By Richard Fullalove, Asset Standards Authority
The connected and automated vehicle (CAV) has experienced rapid capability growth. Typical innovations in the form of CAV functions include, but are not limited to:
- Adaptive cruise control
- Collision avoidance
- Lane keeping
- Automatic parking
- Auto-pilot (i.e. Tesla)
These innovations keep stacking up, while transport authorities have responded with interim policy and regulation to govern the test and evaluation or full implementation of CAVs on the road network. The operational concept framework (OpsCon) method could be a viable means to facilitate systematic analysis of "a day in the life" user story for a CAV from a transport authority perspective.
Operational Concept Framework
Novel, complex and risky concepts such as CAVs and their interaction with the existing road network, intelligent transport systems and other users/actors will require a well-defined Operational Concept Framework (OpsCon). With this framework, transport authorities can evaluate these scenarios against existing road transport policy and regulations.
Before visiting each of the framework topics, we should state the levels of automation for CAVs as defined by the Society of Automotive Engineers (SAE):
- L0 (No Automation): Automated system has no vehicle control, but may issue warnings.
- L1 (Driver Assistance): Driver must be ready to take control at any time.
- L2 (Partial Automation): The driver is obliged to detect objects and events and respond if the automated system fails to respond properly.
- L3 (Conditional Automation): Within known, limited environments (such as freeways), the driver can safely turn their attention away from driving tasks.
- L4 (High Automation): The automated system can control the vehicle in all but a few environments such as severe weather.
- L5 (Full Automation): Other than setting the destination and starting the system, no human intervention is required in all driving modes.
The key topics of this OpsCon have been developed to align with the TfNSW standard T MU AM06008 ST Operational Concept Definition, which in turn was tailored for transport applications based on the OpsCon requirements in ISO/IEC/IEEE 29148: 2011 Systems and software engineering – Life cycle processes – Requirements Engineering, and IEEE Std 1362-1998 IEEE Guide for Information Technology System Definition - Concept of Operations (ConOps) Document.
The key topics addressed in the OpsCon are:
Operational Context describes the broader context within CAVs may be expected to operate. This may include the wider mass transport system, and Intelligent Transport Systems such as Vehicle to Vehicle (V2V) and with intelligent road-side traffic management systems as Vehicle to Infrastructure (V2I).
Operational Outcomes represent the high-level road transport goals related to CAVs, including "reduce road congestion", "reduce human-error-related accidents" or “improved equitable mobility access”.
Operational Use Cases represent the various usage scenarios that may exist or be planned for the future deployment of CAVs on the road network. Examples may include personal CAV ownership, Human Mobility-impaired CAV and heavy freight transport as driverless or highly automated trucks.
Operational Migration Timeline relates to timing of stages of authorisation and deployment of various levels of vehicle automation across limited geographic locations initially, eventually expanding the use of CAVs to the wider road network.
Operational Modes describe situations and conditions for how CAVs will be expected to operate under normal, degraded and emergency modes, the initial conditions that may trigger transitions to and from these modes, and how both humans and software will need to interact to ensure that risk is mitigated during these transitions.
Operational Interfaces are those physical and non-physical interfaces between the CAV and its environment, where the environment may include other vehicles (CAV and non-CAV), road infrastructure, pedestrians, emergency services, and the physical environment itself (e.g. temperature, light, vibration, pollution).
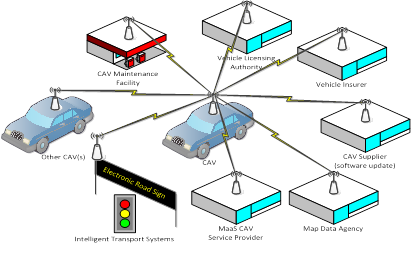
|
Figure 1: CAV Operational Interfaces (some possible examples)
|
Operational Users/Actors are those entities (human or machine) that may be expected to perform an action that relates to the "day-in-the-life" operation of the CAV. These actors will perform actions across operational interfaces that may vary under normal, degraded and emergency mode scenarios.
Operational Zoning is the designation of physical zones where a CAV could be permitted to operate within a certain mode and level of automation.
Operational Scenarios describe conceptually how the CAV will behave, operate and interact with its environment, as part of a "day-in-the-life" story. These will form the bulk of an OpsCon, and each scenario is described in a narrative that tells the story about that scenario, how the CAV is expected to behave and respond, possible variations of that central theme, and possible regulatory changes to address that scenario.
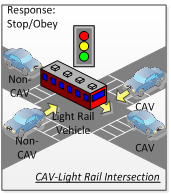
|
Figure 2: Light rail interaction
|
Operational Risks relate to the likelihood and severity of CAV-related risks, including deviation by the CAV from designed intent, and possible consequences of these events.
Operational risks should be identified, assessed and treated in accordance with established international standards such as ISO 31000 as follows:
- Establish the context (define CAV system boundary and environment)
- Risk identification
- Risk analysis
- Risk evaluation
- Risk treatment
- Communicate and consult
- Monitor and review.
An extract from a paper by Richard Fullalove, Manager, Systems Engineering Process, Asset Standards Authority (Transport for NSW). For the full version of the paper, please email [email protected]
By Richard Fullalove, Asset Standards Authority
References
[1] ISO/IEC/IEEE 29148: 2011 Systems and software engineering – Life cycle processes – Requirements Engineering
[2] IEEE STD 1362:1998 IEEE Guide for Information Technology – System Definition – Concept of Operations (ConOps) Document
[3] Asset Standards Authority, T MU AM 06008 ST, v2.0, 26/03/2015, Operations Concept Definition (standard)
[4] Asset Standards Authority, T MU AM 06008 GU, v1.0, 28/05/2015, Operational Concept Definition (guide)
[5] MIT Technology Review, "Audi’s New Technology Is the Beginning of the End of Traffic Lights", Michael Reilly, August 17, 2016
[6] National Transport Commission Australia Discussion Paper "Regulatory options for automated vehicles", May 2016
[7] SAR International Standard J3016, Levels of automated driving
[8] SAE International brochure, "Automated driving - Levels of driving automation are defined in new SAE International Standard J3016"